欢迎来到天津华茂致远自动化科技有限公司网站!

 185-12233227
185-12233227






为了获得实际的材料去除量,主要的方法是采用离线或在线测量,建立数学预测模型。近年来,研究人员利用图像视觉对材料去除的估计进行了大量的研究。Joshi等人使用机器视觉方法来获取和识别抛光表面上的表面图像的纹理特征,并使用基于机器视觉参数的回归模型来评估表面粗糙度.王等采用二维卷积神经网络学习算法对材料去除方法进行监控,从视觉信号中提取颜色、纹理、形状等特征。这些特征构成二维特征矩阵作为输入参数,砂带打磨过程中的材料去除率作为输出参数。该方法可用于预测不同砂带规格和不同打磨参数的材料去除率,适用于典型工况下材料去除率的回归预测。







粗匹配的精度达不到制造业规定的精度,必须通过精匹配进一步提高精度。
传统的精细匹配算法以ICP算法为代表。该算法的原理是旋转矩阵稀有和平移向量T通过求解点集的ICP算法的公式(4)获得P我和X我。
该算法对于重叠率高、初始位置接近的点云具有良好的配准效果,但在计算量和迭代收敛速度方面存在不足。通过粗匹配,ICP算法可以解决重叠度低和初始位置差异大的问题。由于人工智能算法的发展,研究人员也对基于深度学习的点云智能配准进行了大量的研究。
传统点云配准方法
在传统配准算法的基础上,通过分析进一步提高了算法的速度和精度;传统算法的性能原理

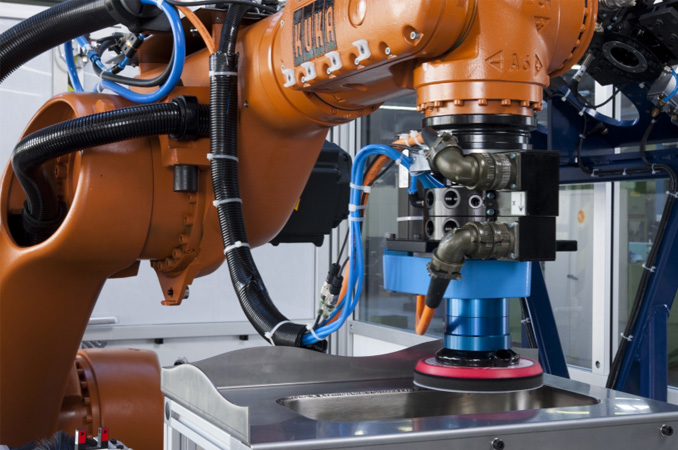
丹佛斯VLT驱动器用于控制感应主轴电机,转速高达12,000 rpm。VFD能够以足够的动态响应进行速度和扭矩调节,以优化打磨过程。该驱动器甚至能够执行1/32英寸主轴定向循环。旋转位置,以便机器人可以拾取打磨加工范围所需的几个砂轮中的一个。
打磨复杂金属铸件困难的一个方面是确定零件的方向,并为机床创建一个原始位置参考。SET机器人打磨中心以的方式处理这个问题。
准备打磨的零件被夹在一个大型旋转台上,该旋转台可以像装载机/卸载机一样进行索引,使机器人可以根据尺寸一次访问2或4个零件。零件以镜像固定——这简化了机器人打磨路径的编程。工作单元中的多个零件还有助于确保高操作效率,从而大限度地提高生产率。

扫一扫手机网站








 在线客服
在线客服 185-12233227
185-12233227 litao_llt@163.com
litao_llt@163.com